











STM32H743处理器
航天级ADI16470加速计&陀螺仪
RM3100工业级罗盘
| X7+ PRO Technical Specification | |
| Master Processor | STM32H743 |
| Master Processor Frequency | 480MHz |
| Flash | 2MB |
| RAM | 1MB |
| Accelerometer & Gyro | ADIS16470 + ICM-42688-P + ICM-20689 |
| Electronic Compass | RM3100 |
| Barometer | MS5611*2 |
| UART | 5 PCS |
| I2C | 6 PCS(2 of them integrated in GPS & SAFETY + UART 4 interface) |
| CAN | 2 PCS |
| ADC IN | 1 PCS(support 6.6V and 3.3.V) |
| SPI | 1 PCS |
| PWM OUT | 14 PCS(M1~M12 support DSHOT) |
| RC IN | 1 PCS(support PPM/SBUS/DSM) |
| RSSI | PWM or 3.3 Analog Voltage |
| Power Input | 2 PCS (Power A to ADC, Power C to CAN) |
| GPS Interface | 2 PCS |
| Safety Switch | In the GPS&SAFETY interface |
| Buzzer | In the GPS&SAFETY interface |
| Debug | 1 (UART7) |
| JATG | 1 PCS |
| USB | Type-C*2 |
| TF Card Slot | 1 PCS |
| Operating Voltage | 4.5~5.5V |
| USB Voltage | 4.75~5.25V |
| Servo Voltage | 0~36V |
| Operating Temperature | -20~85℃ |
| Size | 77×45.5×39mm |
| Weight | 105g |
| Support Firmware | Ardupilot 4.10/PX4 V1.13 and later version |
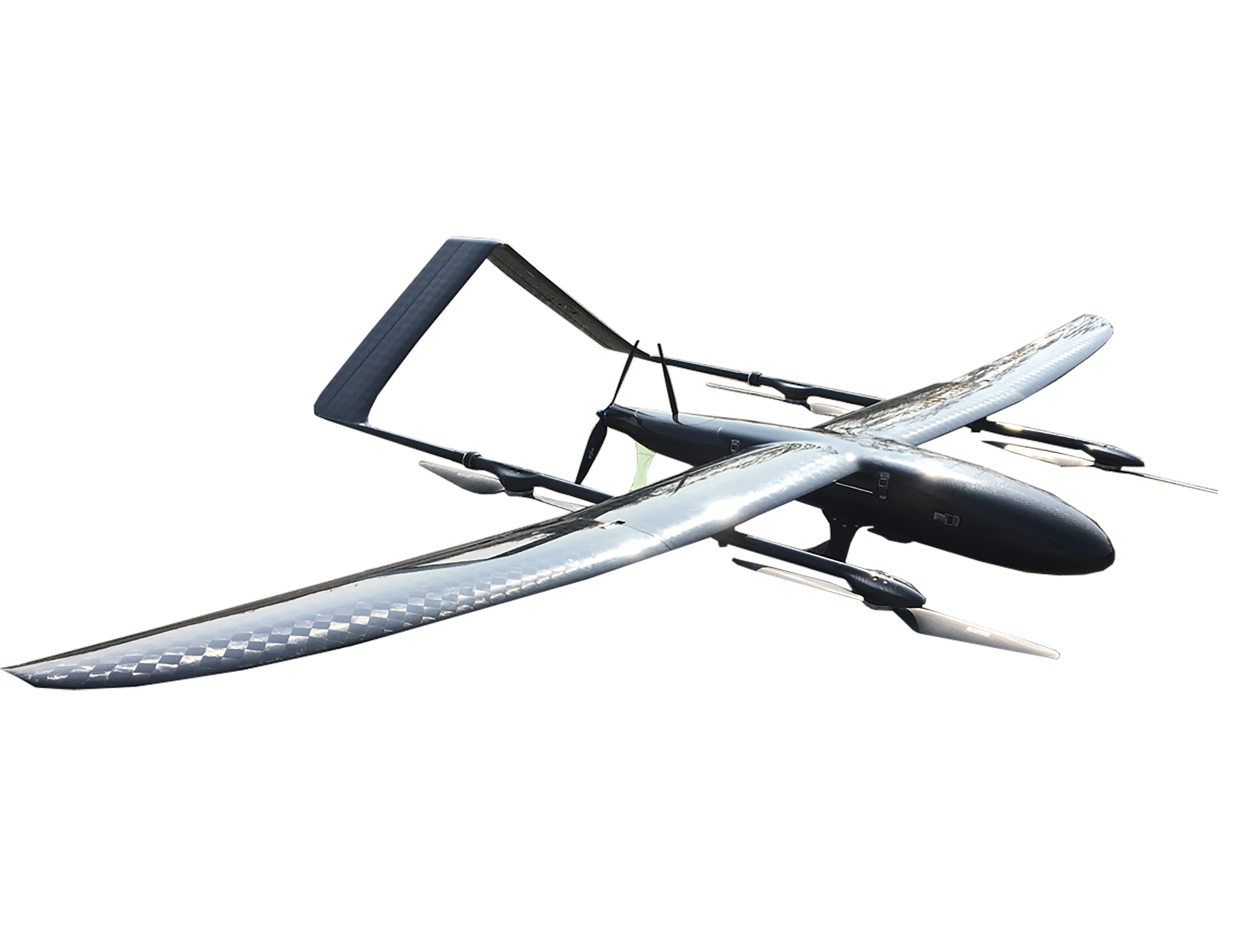
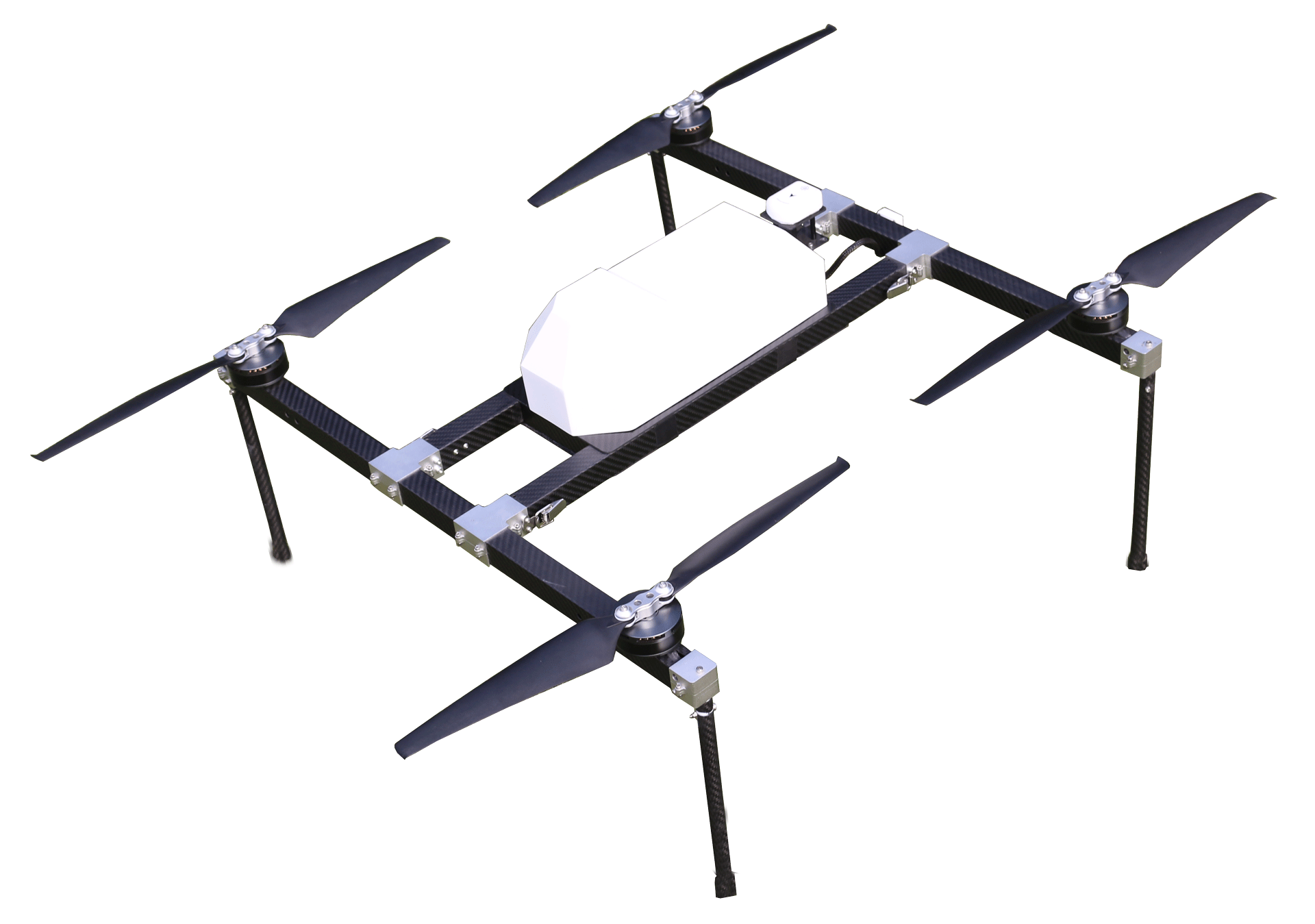
| Support Type | Multi-rotor/Fixed wing/Helicopter /VTOL vertical take-off and landing |
| /Unmanned ship/Unmanned vehicle, etc | |
 Successfully added!
Successfully added!