











硬件参数
主处理器 STM32F765 (32 Bit Arm® Cortex®-M7, 216MHz, 2MB flash, 512KB RAM)
传感器
加速计 ICM-20602/ICM-20689/BMI055
陀螺仪 ICM-20602/ICM-20689/BMI055
电子罗盘 IST8310
气压计 MS5611
接口
UART串口 5
I2C 4
PWM输出 最多11路PWM输出(8路标准PWM+3路可选PWM/Capture输入)
nARMED* 1
遥控器信号输入协议 PPM/SBUS/DSM
RC IN 1
PPM IN 1
RSSI输入 PWM或3.3模拟电压
CAN标准总线 2
电流电压输入 1
安全开关 1
GPS接口 1
Debug 1
JATG 1
USB接口 1(Type-C)
支持机型
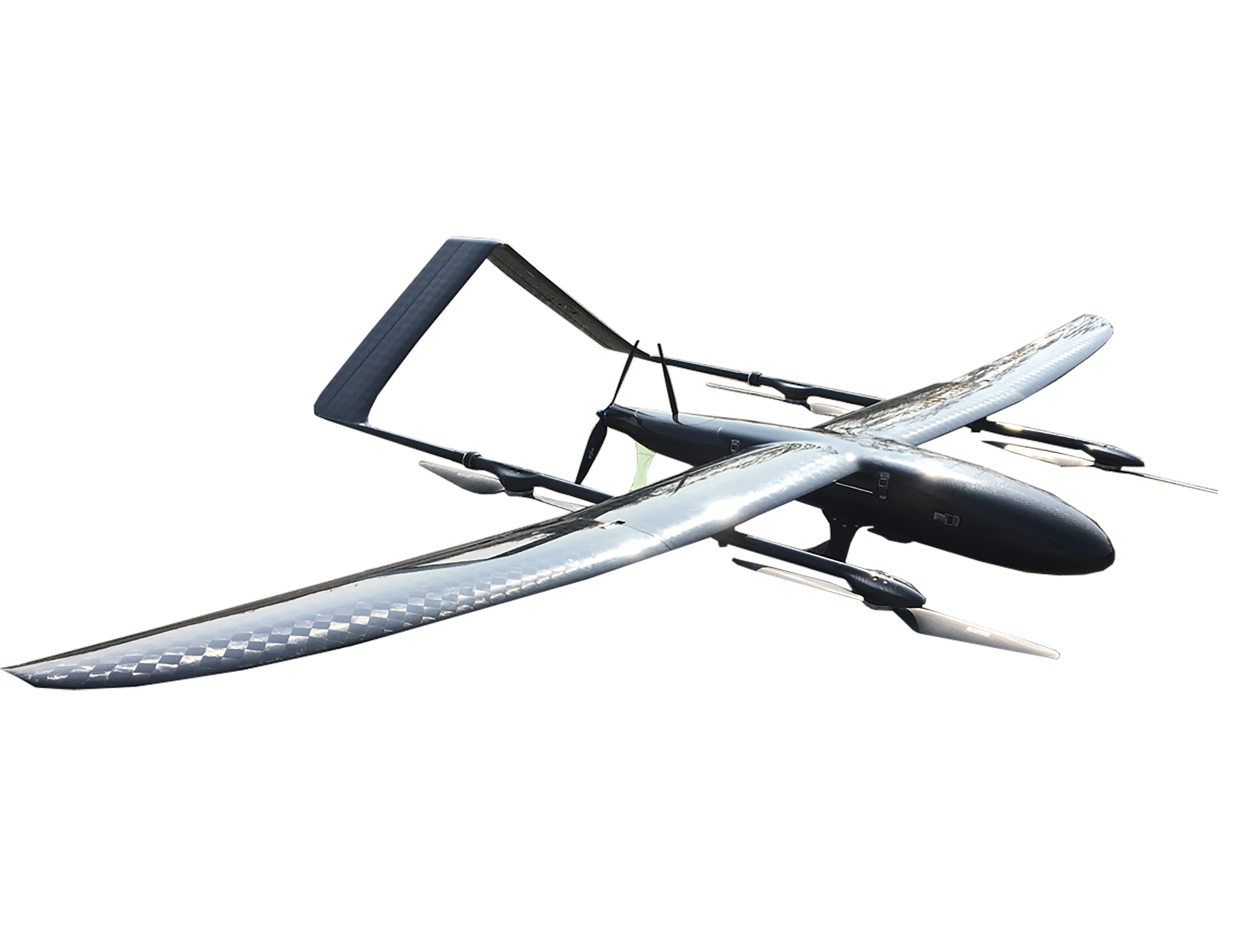
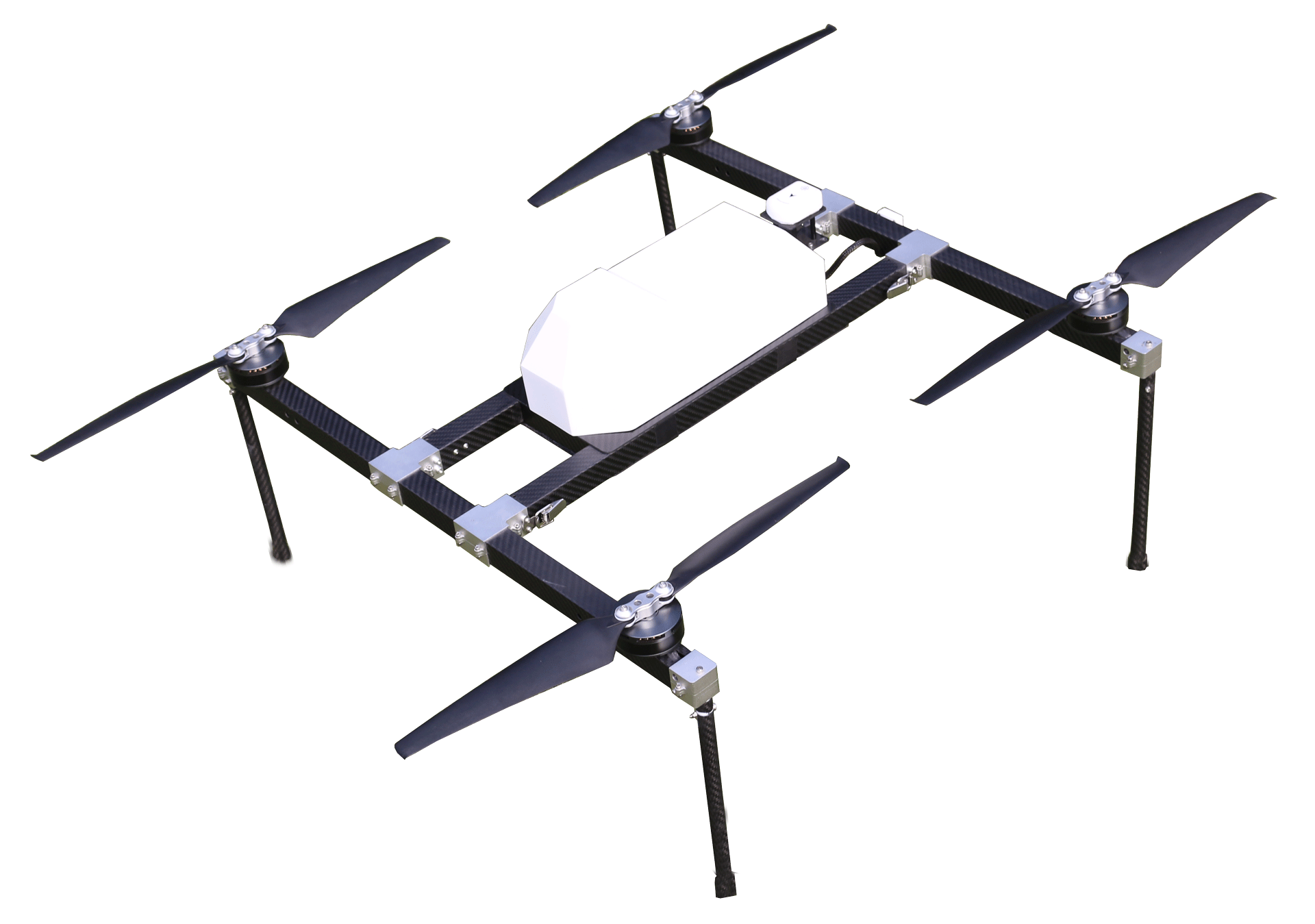
PX4固件 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人车/无人船等
工作环境及物理参数
PM工作电压 4.5 ~ 5.5 V
USB电压 5V +- 0.25v
伺服输入 0-36v
工作温度 -40 ~ 85°c
尺寸
57*34*17mm
重量 50g

V5 nano®是由CUAV®与PX4团队专为对空间极为敏感但希望获得V5强大功能的企业或爱好者而设计的自动驾驶仪。
它的设计基于Pixhawk FMUv5的标准并且完美兼容PX4 和 ArduPilot固件。
| V5 nano Technical Specification | |
| Hardware Parameters | |
| Main processor | STM32F765 (32 Bit Arm® Cortex®-M7, 216MHz, 2MB flash, 512KB RAM) |
| Sensors | |
| Accelerometer | ICM-20602/ICM-20689/BMI055 |
| Gyro | ICM-20602/ICM-20689/BMI055 |
| Electronic Compass | IST8310 |
| Barometer | MS5611 |
| Interfaces | |
| UART | 5 |
| I2C | 4 |
| PWM Output | Up to 11 PWM Outputs (8 Standard PWM+3 Optional PWM/Capture Inputs) |
| nARMED* | 1 |
| Remote Control Signal Input Protocol | PPM/SBUS/DSM |
| RC IN | 1 |
| PPM IN | 1 |
| RSSI Input | PWM or 3.3V Analog Voltage |
| CAN Standard | 2 |
| Current-voltage Input | 1 |
| Safety Switch | 1 |
| GPS | 1 |
| Debug | 1 |
| JATG | 1 |
| USB | 1 (Type-C) |
| Support Type | |
| PX4 Firmware | Multi-rotor/Fixed wing/Helicopter /VTOL vertical take-off and landing /Unmanned ship/Unmanned vehicle, etc |
| Working Environment and Physical Parameters | |
| PM Operating Voltage | 4.5 ~ 5.5 V |
| USB Voltage | 5V ± 0.25v |
| Servo Input | 0-36v |
| Operating Temperature | -40 ~ 85°c |
| Size | 57×34×17mm |
| Weight | 50g |
 Successfully added!
Successfully added!